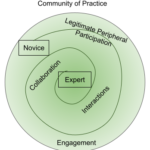
Communities of practice are essential to the growth and development of a group of people in a common discipline or profession. Faculty need support in their teaching, development of new instructional approaches, and in publishing their scholarship of teaching and learning research. Similarly, students also benefit from a community of practice within their peer group. We explore various ways to establish communities of practice and their impact on participant development.
Research
Engineering Education
Design Thinking
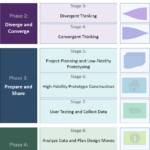
The design thinking for engaged learning (DTEL) model is used to structure collaborative project-based learning. It is related to human-centered design and is grounded in the following learning theories: constructivism, constructionism, and designerly ways of knowing. These theories support the following design principles: learning by making and regular reflective activities. We conduct design-based research (iterative cycles of development, testing, and refinement of interventions in authentic contexts) over several iterations/semesters in several courses across multiple disciplines to refine the design thinking approach for supporting collaboration.

Instructional Methods
We explore and develop several instructional methods to support teaching and learning in engineering courses. These include pre-course and first day introduction surveys, collaborative course design through course maps, and discussion groups among faculty to share teaching innovation ideas and challenges.

Role of Peer Feedback
While peer feedback has significant potential to improve student learning, the educational context can play a determinant role. We explore the role of peer feedback and evaluation in student learning through design-based research (iterative cycles of development, testing, and refinement of interventions in authentic contexts). This work is grounded in the following learning theories: social constructivism, cognitive constructivism, and metacognition.

Supporting Universal Design and Collaboration
We develop learning activities specifically designed to help students recognize implicit bias in the things they create and to support more collaborative mindsets and communities. This work is grounded in the following learning theories: identity theory and universal design. These theories support the following design principles: discussions and regular reflective activities. We conduct design-based research (iterative cycles of development, testing, and refinement of interventions in authentic contexts) over several iterations/semesters in several courses across multiple disciplines to refine the design thinking approach for supporting collaboration.
Randomized Motion Planning Algorithms
Constrained Systems
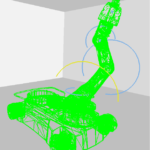
Constrained motion planning problems place a set of constraints on the robot’s motion. Constraints could require that parts of the robot occupy certain subsets of the workspace (e.g., manipulator grasping) or that they remain in contact with each other (e.g., closed chains). These problems are challenging because the probability of generating a constraint-satisfying sample approaches zero. We reparameterize the problem through reachable volumes such that generating constraint-satifying samples is trivial.
Shape Primitive Skeletons
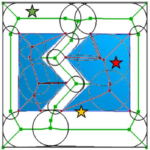
A volume of space can be represented by a skeleton overlaid with shape primitives (e.g., spheres, cubes, ellipsoids). The shape primitive skeleton is completely contained in the original space and can be used to perform fast inclusion tests. This is particularly helpful to reduce collision detection time in motion planning algorithms.
Disassembly Planning
Disassembly sequence planning identifies physically viable plans to disassemble an assembly of parts. It is crucial towards a more automated product design and manufacturing process. We develop a general framework for disassembly sequence planning that is capable of allowing different search schemes, various part separation techniques, and the ability to group parts, or not, into subassemblies to improve the solution efficiency and parallelism. This gives the new ability to approach disassembly sequence planning in a truly hierarchical way.
Parallel Motion Planning
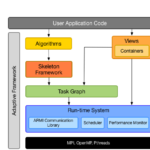
We develop parallel algorithms for motion planning applications. In particular, we use the Standard Template Adaptive Parallel Library to build platform independent code that can handle both shared memory and distributed memory models, without requiring user code modification. We have successfully applied this to both motion planning and protein folding applications. We design a general framework for these sampling based motion planning algorithms that subdivides the motion space into (possibly overlapping) regions and independently, in parallel, uses standard sampling based motion planners to construct solutions in each subdivision. It then merges these solutions together to form a large roadmap, or graph, of the motion space which describes motion pathways between various points in the space.
Motion Planning with the Medial Axis
We use the observation that any point, free or not, may be retracted to the medial axis by monitoring when the witness point (for collision) changes during the retraction. We use this function to apply medial axis retraction to two large classes of sampling based motion planning algorithms: PRMs and RRTs. We develop two sampling based algorithms, MAPRM and MARRT, for solving narrow passage problems and generating high clearance solutions.

Uniform Sampling Framework for Motion Planning
Much effort has been put on biasing sampling towards some specific C-space surfaces, such as near obstacles or along the medial axis, to improve performance or to find paths with desirable properties. However, none of these methods provide any guarantees on how well their target surface is sampled. We develop a uniform sampling framework that guarantees to generate uniformly distributed configurations on the target surfaces. It only requires some simple membership test on a fixed length line segment with respect to the target surfaces, which can be relatively fast. We present two instances of this framework: UOBPRM and UMAPRM.

Sampling Based Motion Planning Frameworks
Sampling based motion planning algorithms can be applied to any type of robot, from simple rigid bodies to complex articulated linkages. These algorithms use randomization to construct a graph or tree (roadmap) on which queries (start/goal configurations) may be solved. We explore different general purpose frameworks for sampling based motion planning to improve planner performance or customize result for different planning preferences.

Modeling Protein Motion
Despite the explosion in protein structural and functional data, our understanding of protein and movement is still very limited. Experimental methods cannot operate at the time scales necessary to record protein folding and motions, and traditional simulation techniques such as molecular dynamics and Monte Carlo methods are too computationally expensive to simulate long enough time […]
Decoy Database Improvement
Predicting protein structures and simulating protein folding motions rely on an accurate scoring function which attempts to distinguish the native structure from one or more non-native structures. Decoy databases are collections of non-native structures that are widely used in testing these scoring functions. We present a method to evaluate and improve the quality of such databases by adding novel structures and/or removing redundant structures.
Modeling RNA Folding
We propose a novel motion planning based approach to approximately map the energy landscape of an RNA molecule. Our method is based on the probabilistic roadmap (PRM) motion planners we have successfully applied to study protein folding. The key advantage of our method is that it provides a sparse map that captures the main features of the landscape. We can use our roadmap to compute RNA population kinetics and transition rates. We validated our technique by comparing population kinetics of the complete landscape to that of our roadmap for several small RNA. We also studied energy barriers along pathways between the correct RNA structure and the misfolded structure